.: Comentarios Previos.
Existe una gran variedad de entrenadores en toda la red, a los cuales se suma el mío, esto no significa que deban armarlo, pero si de algo les sirve, pues, aquí se los dejo.
El circuito es muy sencillo, y está construído con la intensión de ser utilizado en conjunto con otra u otras placas, montadas sobre ellas mimas.
La idea suge con la finalidad de introducirnos en la construcción de minirobots, más bien conocidos como microbots, puesto que desde el inicio de esta web, quería darle esta orientación, aunque luego me fuí por cualquier lado. Bien, la que sigue es una imagen del entrenador. Eso sí..., no me vayan a criticar los puentes, o los denuncio...!!!.
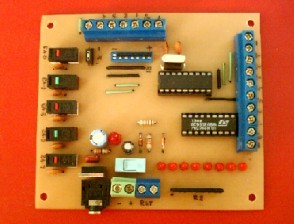
Ahora veamos que es lo que tiene este entrenador y cómo utilizarlo.
.: Fuente de alimentación:
Como la idea es utilizarlo con baterías, no le puse diodos de rectificación, sino más bien un regulador de tensión (7805) para mantenerlo a 5 volts. Ahora bien, posee dos conectores, uno de ellos es para cuando lo utilizemos como entrenador, ya que por lo general disponemos de una fuente rectificada y una ficha tipo plug, el otro conector es simplemente una bornera (aquella de color verde, justamente para identificarla), allí se encuentran marcados los polos de conexión, para así evitar errores, todo esto lo puedes ver en la siguiente imagen...

Me olvidaba..., el LED que se encuentra en la fuente, es para saber si realmente está llegando tensión a la placa, y así no tenemos necesidad de estar testeando para hacer esta prueba.
.: Circuito de Reset:
Del mismo lado y junto a la fuente se encuentra el circuito de Reset del micro, que por lo general lo utilizamos en nuestro entrenamiento, es por eso que cuenta con un micropulsador, (que lo saqué de un viejo mouse, quien dijo que hay que tirarlos...???)
Cuando comencemos nuestros proyectos con microbótica, seguramente resetearemos el micro desde algún sensor, o algo por el estilo, asi es que le agregué una bornera para cuando llegue ese momento.

Te preguntarás como utilizar la bornera, pues muy sensillo, sólo debes unir los dos bornes, y habrás ocasionado un reset en el micro
.: El Puerto B:
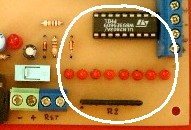
De buenas a primeras, tienes la posibilidad de probar tus programas haciendo uso de las entradas y salidas que desees, por ejemplo, se ha previsto al puerto B del micro, con un integrado ULN2803 y 8 LED's, acompańados de un Array de resistencias R2, puesto que por lo general, este puerto se utiliza para salida.
Por ejemplo, si envías a este puerto el valor 00000011 se encenderán los dos primeros LED's. Cabe aclarar que el ULN muere allí, en los LED's
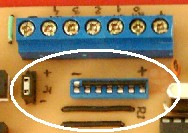
De todos modos, del lado del ULN se encuentra una colección de borneras las cuales corresponden al puerto B del micro y reflejan el estado de los pines del PIC16F84 (NO del ULN), por si deseas utilizar estas seńales para cualquier otra tarea, como por ejemplo, la utilización de Displays, u otros dispositivos.

Por si fuera poco, los extremos de la bornera poseen los polos de la fuente de alimentación de la placa (0v y 5v), por si deseas introducir seńales por estos pines, así no estás metiéndole cualquier cosa al micro, sino los niveles de tensión que corresponden.
.: El Puerto A:
Al puerto A, le puse unos pulsadores (sacados del mouse), están colocados de tal modo que tengas la posibilidad de seleccionar la polaridad de los mismos, mediante un jumper de tres puntos (J1), donde el punto medio es el común de los pulsadores, y sus extremos son los polos positivo y negativo, esto nos dá la libertad de elegir el tipo de seńal que se enviará al micro por los pines de este puerto.
Los capacitores junto a los pulsadores se implementaron para evitar la inestabilidad de los mismos, aquello que conocemos por rebotes eléctricos.

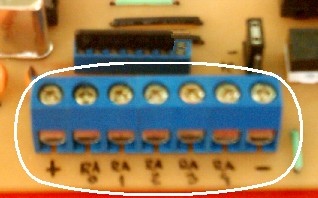
Notarás también, que del lado de las borneras del puerto A, se encuentra un array de resistencias de 10k, y que le sobra un pin de conexión, pues bien, uno de los extremos es positivo y el otro negativo, te preguntarás, por que...??, sencillo..., si al activar los pulsadores envian cero al micro, cuando reposen deberán estar en uno. Esto significa que si el jumper (J1) de los pulsadores está unido al polo negativo, el array deberá estar unido al positivo, y al revés, cuando el jumper de los pulsadores esté en positivo el array deberá estar en negativo, y así al activar el pulsador enviarás un uno lógico.
También puedes notar en esta imagen, que se encuentra una bornera correspondiente al puerto RBA, esto es para cuando no utilices los pulsadores, en ese caso, la seńal que ingrese por el puerto A vendrá seguramente de sensores de un microbot o de cualquier cacharro que estemos haciendo, por la misma razón dejé los extremos de la bornera con los polos de la fuente de alimentación, y así no nos preocupamos por la alimentación de esos sensores.
Bien mis queridos amigos, sólo resta dejarles los esquemas del circuito y el PCB para quienes deseen armarlo.

Vuelvo a repetirles, no es obligación que lo armen ni nada por el estilo, eso queda a criterio de cada uno, por otro lado, creo que es bueno disponer de una placa así, a demás creo que sirve como idea para que armes la tuya propia, no crees...??
Saludos...
R-Luis...
|