Todos los circuitos que se incluyen en esta secciµn son los que estamos utilizando con mis alumnos en nuestra mÃquina, y vamos a comenzar asÚ...
.: Fuente de Alimentaciµn

El circuito es muy sencillo, consiste en una fuente doble, es decir, vamos a controlar dos tensiones distintas, una serà para la interfaz, y la otra para alimentar los motores, como los que yo tengo son de 12 voltios, utilicÕ un regulador de tensiµn 7812, y para la interfaz un 7805, los transformadores, obviamente corresponden al nivel de tensiµn a utilizar, el de los motores es de 1A, y el otro mÃs pequeþo es de 300 mA, aquÚ tienes el esquema del circuito...
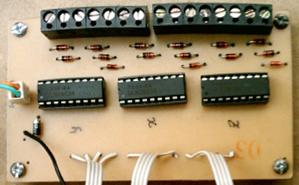
Antes que lo olvide, ves esos cuadros violetas, bueno, se conocen como puentes rectificadores, creo que no los habÚamos incluido en ninguno de los circuitos que vimos hasta ahora, en realidad estÃn reemplazando a los tÚpicos 4 Diodos, que son los que se usan comºnmente, lo que tienen de bueno es que simplifican un poco el circuito, a demÃs los puedes encontrar en las fuentes de alimentaciµn que solÚan venir en las antiguas PC's, que si seguramente tienes una inservible, puedes sacarlo de allÚ, aquÚ tienes una imagen de este componente...
Como verÃs, los polos estÃn marcados cada uno con su signo, que son los terminales de ambos extremos y los dos del centro son las entradas de corriente alterna.
El valor de los Capacitores, C2, C3, C5 y C6 es de 0.1uf, preferiblemente de Poliester, C1 es de 2200uf/16V y C4 de 2200uf/35V. SerÚa bueno que le coloques disipadores a los reguladores de tensiµn, para evitar que se daþen, o que comiencen a recalentar. AquÚ las 3 tÚpicas imÃgenes del pcb...
Vista superior Vista del lado del cobre Vista Real
El resto del circuito, consiste en dos mµdulos, uno de ellos es la interfaz para el Puerto Paralelo, y el otro es la Controladora de Motores...
.: Interfaz para el Puerto Paralelo.
Cuando armamos esta interfaz, tenÚamos pensado incorporar varios sensores en la mÃquina, por ejemplo, los fines de carrera, que son los que indican si la mÃquina llegµ al extremo final de su recorrido, otros sensores en el mini-taladro para calcular la distancia a la cual se encuentra la herramienta respecto de la pieza de trabajo, y otros mÃs, que si llegamos a incorporarlo, seguramente se van a enterar.
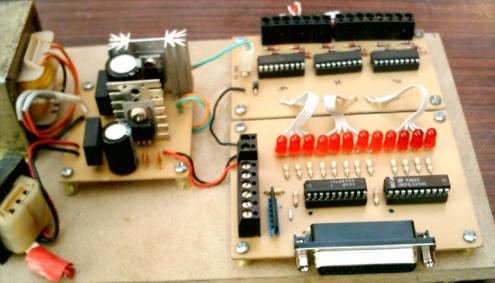
Por esta razµn habÚamos previsto una interfaz completa, a demÃs, como los chicos reciÕn estaban familiarizÃndose con este puerto, le pusimos unos LED's para que pudieran practicar y ver como se envÚan las seþales, asÚ que este mµdulo tambiÕn podrÚa servir de entrenador para el Puerto.
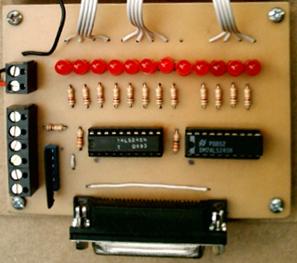
Por lo pronto, no le prestes atenciµn a la bornera de 6 contactos ni al array de resistencias que se encuentra en la foto, ya que por ahora no estÃn siendo utilizados, de todos modos, el circuito para las entradas se encuentra descrito en el tutorial de puerto paralelo.
Pero veamos lo que sÚ se està utilizando.
Las seþales de salida que controlan los motores, vienen del Registro de Datos (bloque superior del esquema) y del Registro de Control (el de abajo)
No grafiquÕ el puerto para que no te hagas un lÚo con tantas lÚneas, a demÃs a estas alturas ya estÃs mÃs que familiarizado con los pines de este puerto. Los conectores CN1 y CN2 son las salidas de esta interfaz y que luego se unirÃn a la controladora de motores, que por cierto tambiÕn es muy sencilla, debes tener en cuenta la configuraciµn de los Buffers ya que se trata de un buffer bidireccional, es decir que las seþales pueden ser en doble sentido, segºn la tabla de verdad de este integrado, tal como estÃ, los pines A0...A7 harÃn de entradas y los B0...B7 serÃn salidas. La fuente de alimentaciµn para esta etapa es la de 5V. recuerda unir la masa de Õsta con la del puerto, para que la comunicaciµn tenga efecto.
.: Controladora de Motores.
HabÚa pensado utilizar transistores, pero para estos motores no fue necesario, recurrimos al tan conocido ULN2803, pero en una configuraciµn un poco extraþa, aunque dio muy buenos resultados, es mÃs, los dÚas de exposiciµn de la mÃquina, la sometimos a funcionar casi el dÚa completo sin ninguna complicaciµn, bueno, el esquema es el que sigue...
Cada ULN se encarga de manejar la corriente suficiente para un motor, y para que le resulte mÃs liviano se unieron de dos en dos las entradas y las salidas de cada uno, hay que prestarle atenciµn a la polaridad de los diodos 1N4148, que se utilizan como protecciµn para los integrados, por allÚ apareciµ un diodo 1N4004 que viene de la masa del circuito anterior, y que hace de retorno de las seþales enviadas por la interfaz.
A pesar de que los integrados no calientan, serÚa bueno colocarles un disipador, sµlo por una cuestiµn de seguridad, recuerda tambiÕn que se trata de motores PaP unipolares y que trabajan a una tensiµn de 12 voltios.
Bueno, eso es todo, ahora veamos todo junto...
AquÚ dejo los pcb de los tres circuitos, eso sÚ, please...!!! Primero prueba que todo funcione correctamente y luego lÃnzate a montar los circuitos, no quiero que luego llenes mi correo con quejas extraþas como... No funciona...!!! Tu circuito no sirve...!!!, o algo parecido.
Un pequeþo detalle, he quitado del pcb de la interfaz todo el circuito de entrada, puesto que hasta ahora no està siendo utilizado, de todos modos si lo quieres agregar, te cuento que es el mismo que se encuentra en el tutorial de puerto paralelo.
MÃs adelante quizÃs lo cambie para comenzar a hacer multiplexiones, o hasta quizÃs cambiemos de puerto, o lo hagamos con un microcontrolador, bueno no se...
AquÚ queda...

R-Luis...
Tabla de Referencias
|